東大工学部のイマを伝えるホームページ
精密工学科の先生にインタビュー(前編)医学と工学の横断領域「医工学」とは
こんにちは、工学部機械工学科3年の柴田です。 今回は、東京大学工学部精密工学科で医療応用のための精密工学を専門とされている小林英津子先生に、
- 先生の研究内容(前編)
- 先生の進路選択の過程(後編)
についてお話を伺いました。 進学選択を控えた駒場生の皆さんや、行きたい学部を迷っている中高生の皆さんの進路選択の一助になればと思い、「医工学」という分野に焦点をあてて紹介していきます!
医工学とは
医工学は、工学の機械・電気・情報・化学といった知識を医学に応用し、生体の理解および医療に役立つ技術の実現を研究する学問です。 主な分野としては手術支援ロボット・画像診断・内視鏡などの医療機器や人工臓器といった領域があります。
例えば、画像診断分野では、IBM社が医療AI「ワトソン」を開発し、レントゲンやMRIの画像をAIに解析させることで診療の自動化を目指していたり、人工臓器分野では3Dプリンターで人工心臓を作り、ドナーなしで移植をするための研究をしていたりするなど、各分野で最先端の研究が行われています。
小林先生の医工学研究室ではどのような研究をされているのでしょうか?
小林先生:主に「低侵襲手術支援ロボット」に取り組んでいます。 「低侵襲手術」というのは、患者さんの体に負担の小さい手術のやり方のことで、代表的なものに「内視鏡下で行う手術」があります。
従来はメスでガバッと大きくお腹を開いて手術していたところを、小さな穴だけを開け、そこにカメラや電気メスなどが先端についた細長い形の「内視鏡ロボット」を差し込んで手術を行うことで、手術の際に患者さんの体を傷つける範囲を大幅に抑えることができるのです。
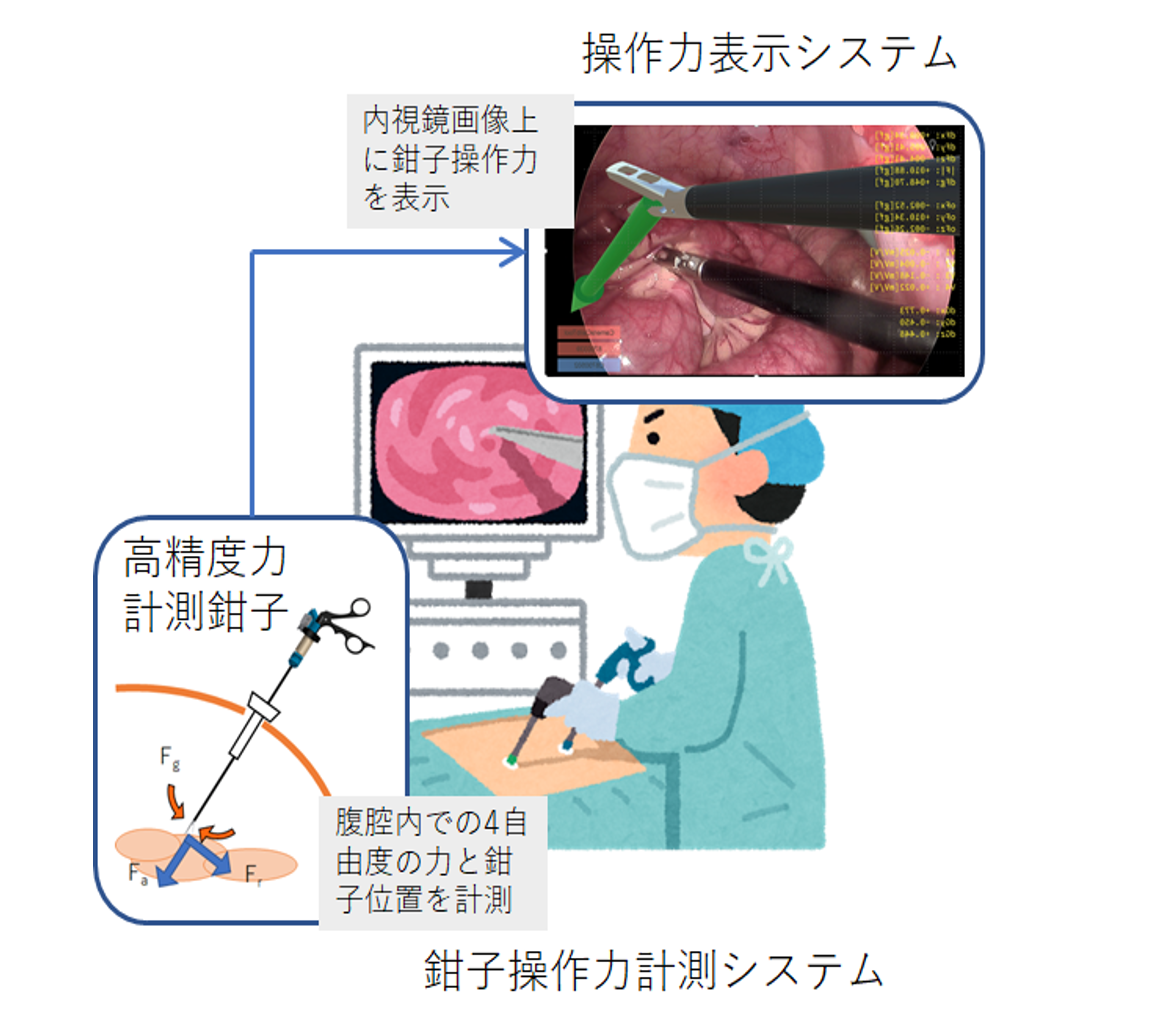
この内視鏡分野で私が携わった一例として、力の計測の研究があります。 医師が何気なく行っている臓器の把持・切離は、実は微妙な力加減が重要となり、ロボットで手術を行う場合でも再現する必要が出てきます。 そこで、手術機器に取り付けたセンサで臓器にかかる力をリアルタイムで見ながら手術する仕組みを作ります。
この時、小さな空間でいかにセンサの精度を失わずセンサを組み込むか、また臓器に損傷を与えない適切な力とは何かを解析する点に工学の知識を使います。

医療ロボットの未来について教えてください
小林先生:内視鏡手術ロボットの最先端で長らく世界を席巻してきた「ダ・ヴィンチ」という機械があります。 これはアメリカの企業が開発したもので、お医者さんが遠隔操作でロボットのアームを操作して手術を行える画期的なロボットです。 しかし、現在は医師の操作をそのまま再現するしかありません。 将来的には手術も自動化がなされるようになると考えています。 その際に、ロボットが匠の操作をうまく反映し、誰でも熟練医の手術が受けられる、ということを目指しています。
日本でも遠隔医療に向けた機器の開発は行われていますか?
小林先生:「ダヴィンチ」は、2019年に特許が切れたことで他社も類似品を開発できるようになり、日本も川崎重工とシスメックスという企業が共同で「Hinotori」という機械の開発を進めています。 このHinotoriはダヴィンチに比べアームの継手が多く、アーム同士がぶつからずに様々な姿勢を取れることが特徴です。 川崎重工はもともと工業用ロボットの開発を手がける企業で、日本はロボット分野において、スムーズで細かい動きを実現する制御分野に長けており、工業分野で培ってきた知見を活かした技術で海外の医療ロボットに劣らないものを作れるのではないかと思います。
小林先生に、研究されている「医工学」について伺いました。 学生時代から教授になられた現在までのお話に続きます!
後編はこちらから:精密工学科の先生にインタビュー(後編)